单目相机(外置版)使用与开发指南
版本信息
更新日期: 2025.10.25
版本号: V1.1
接口介绍
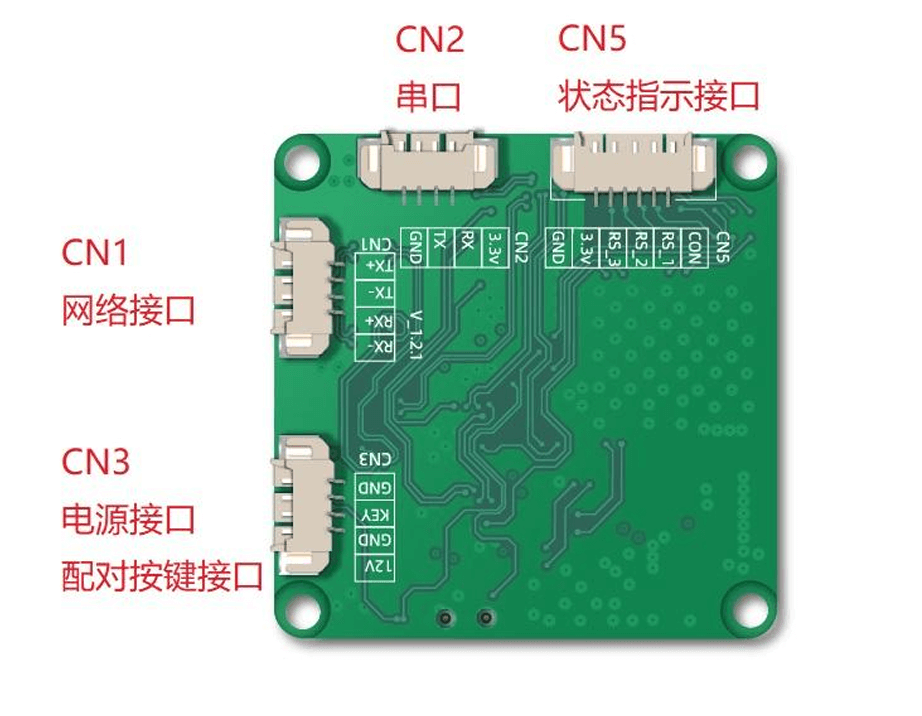
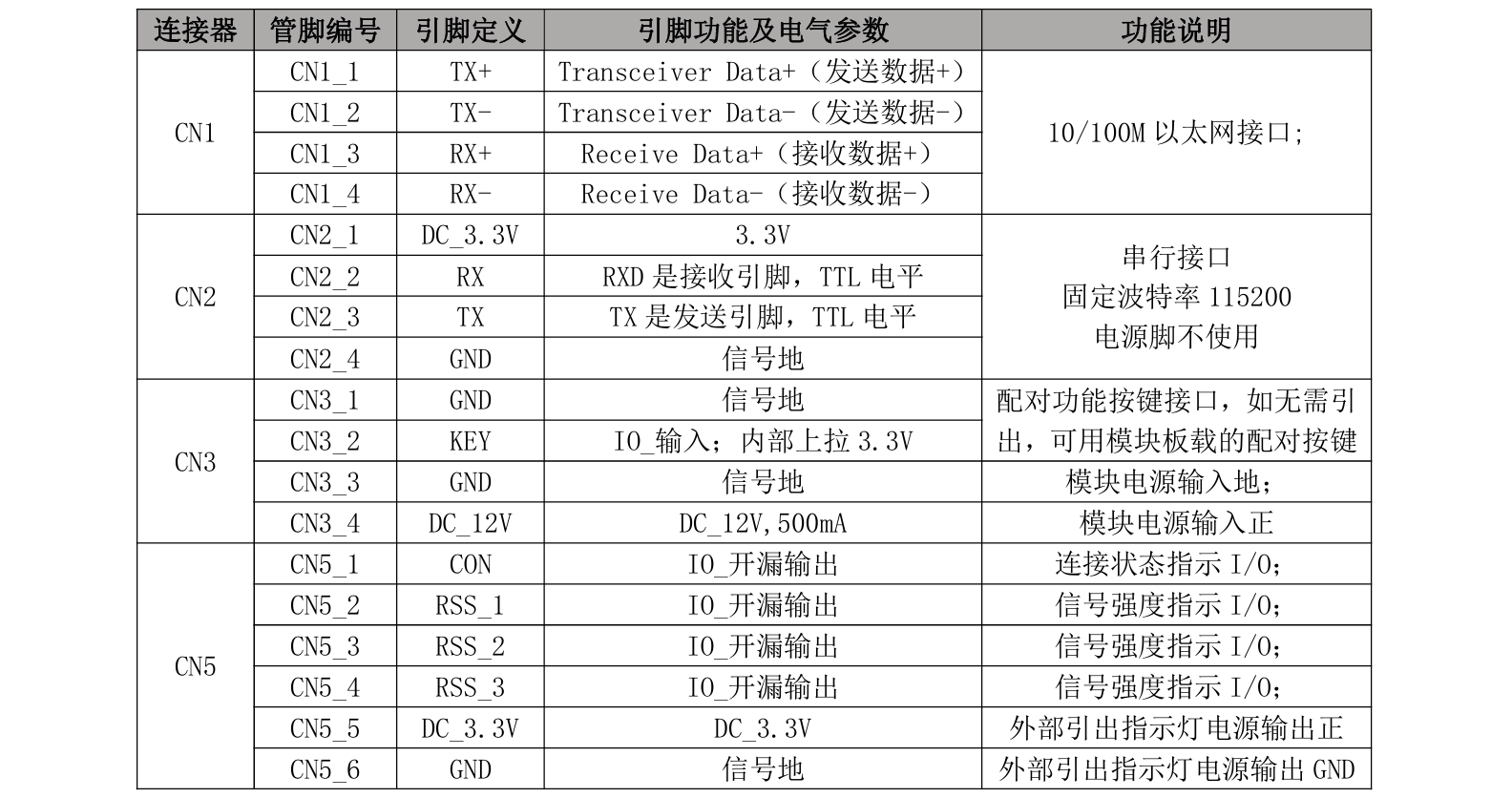
- CN1为网络接口;
- CN2为串行接口;
- CN3为电源接口及配对按键接口;
- CN5为状态指示接口;
下面为更详细的接口定义
对频

拨动开关为模式选择开关,用户可以根据需要选择AP模式或者STA模式,当前图片左SAT模式,右为AP模式。
轻触开关为配对按键。

上图中6个LED是模块状态指示作用:
- “CON”为连接状态、电源指示灯。
- 当插上电源后,CON将会保持常亮(未配对时为短亮后熄灭)。
- CON绿灯常亮代表模块已连接。
- CON绿灯闪烁代表模块成功配对。
- CON绿灯不亮代表模块已断开连接。
“RSS_1-RSS_3”代表无线信号强度:
- RSS_1-RSS_3 全亮,代表接收信号强度大于-48dBm。
- RSS_1-RSS_2 亮,代表接收信号强度大于-60dBm,小于-48dBm。
- 只有RSS_1亮,代表接收信号强度大于-72dBm,小于-60dBm。
- RSS_1-RSS_3 都不亮,但 CON绿灯保持常亮时,代表接收信号强度小于-72dBm。
- 地面端拨动开关设置为AP模式,天空端拨动开关设置为SAT模式
- 同时长按两模块的轻触按键。
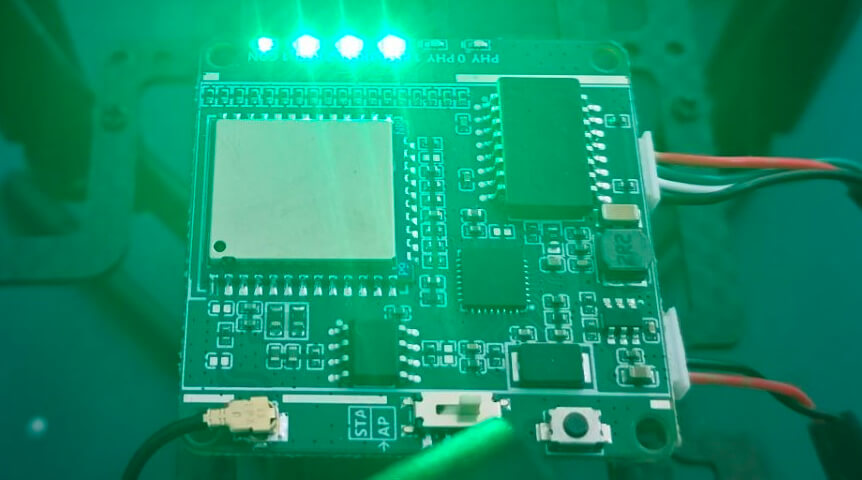
对频成功后如上所示。
使用软件显示画面
配置以太网的静态ip
打开windows设置
点击以太网的属性
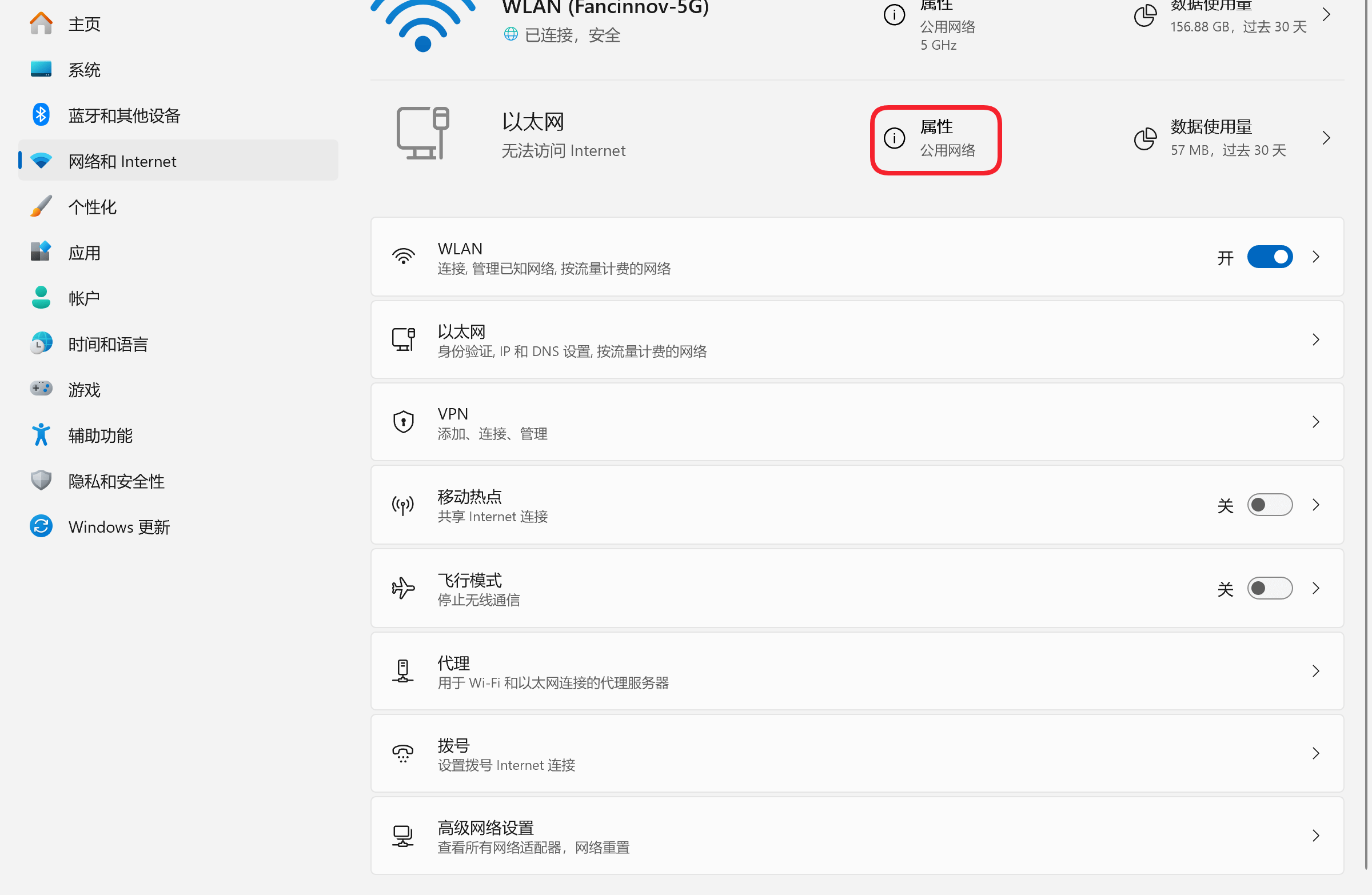
点击IP分配的编辑列表
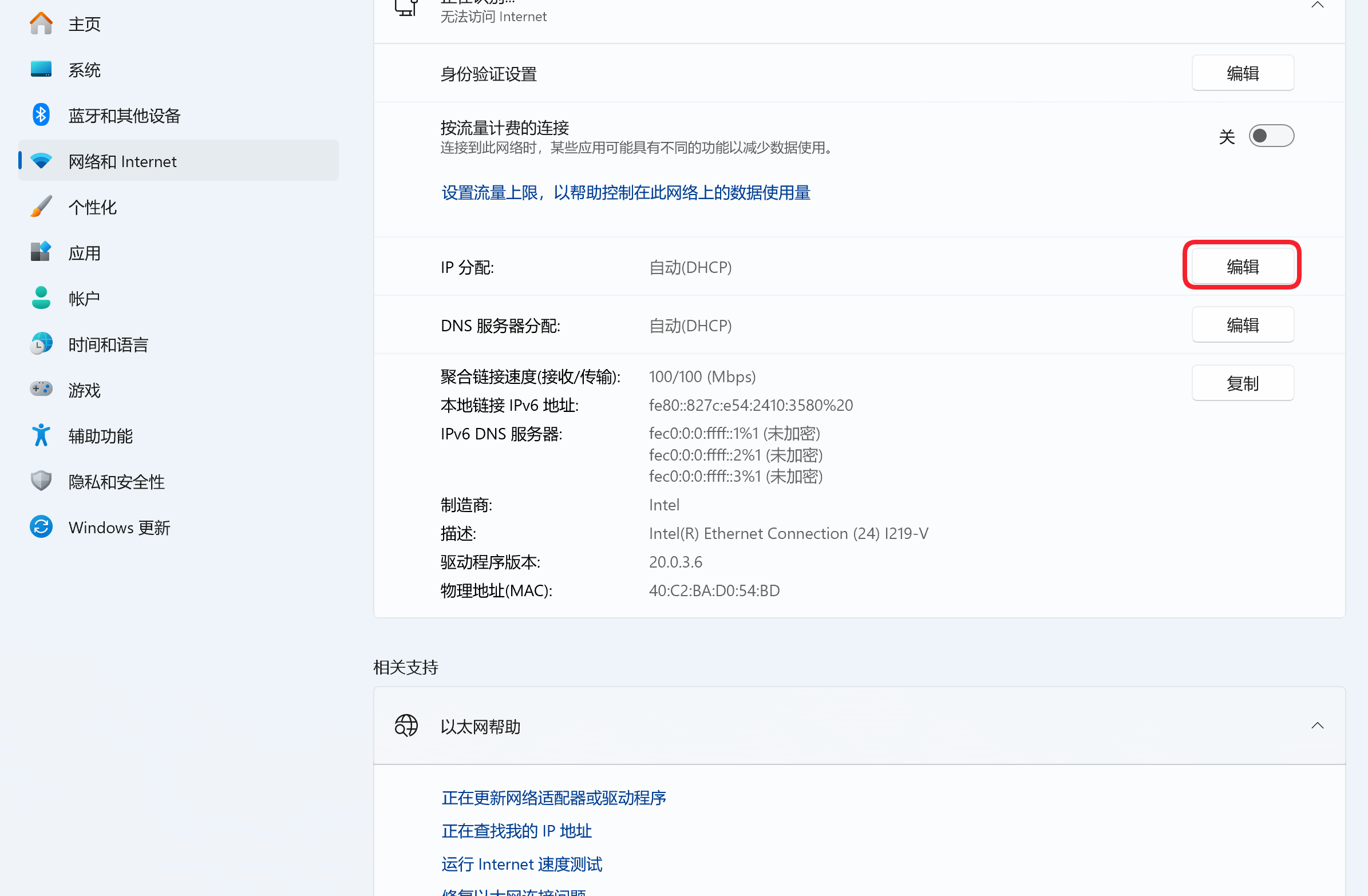
按照下面填写和选择,点击保存
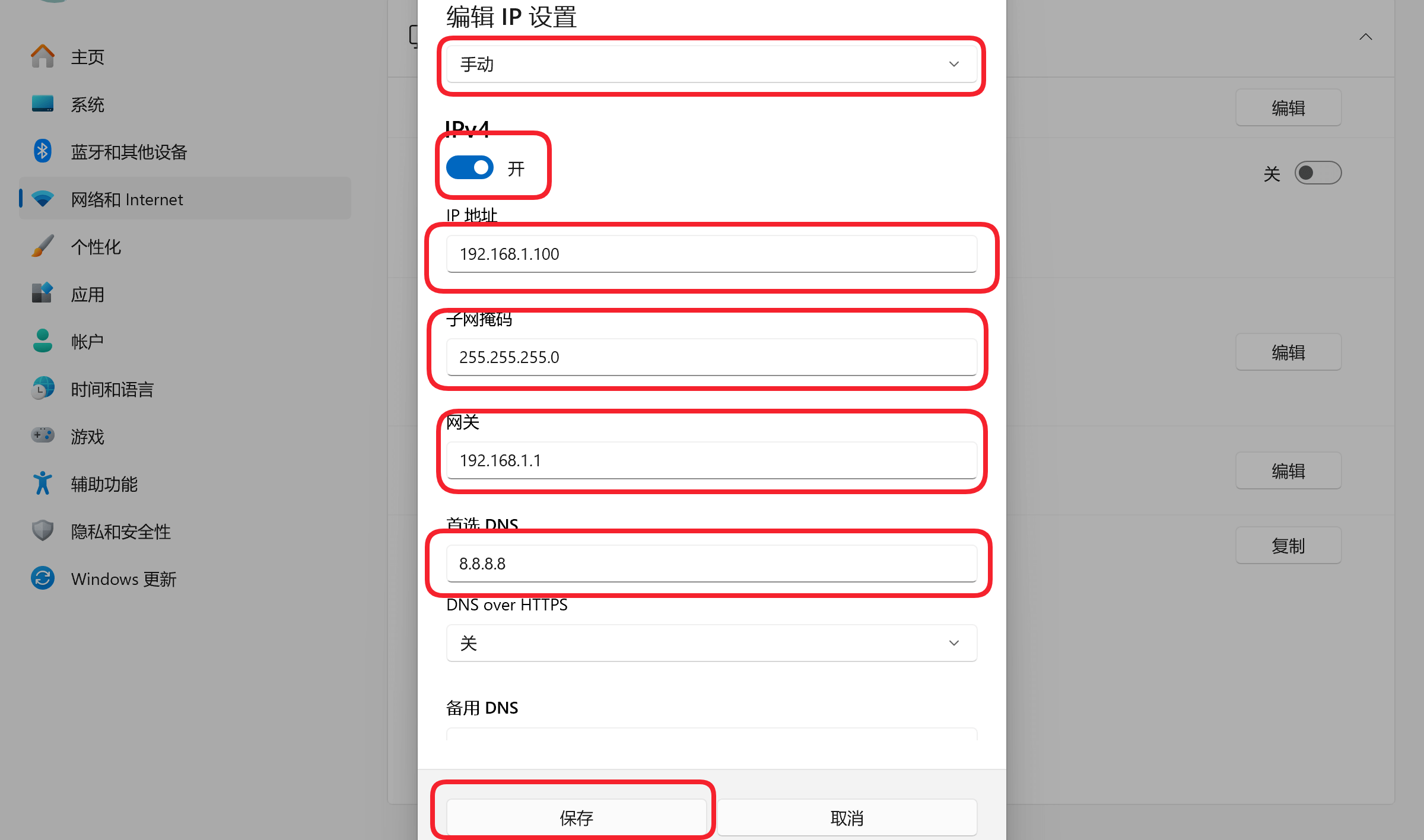
至此以太网的静态ip就配置好了。
接下来我们将图传和电脑通过网线连接。
同时确保天空端的图传模块供电正常并且连接成功。

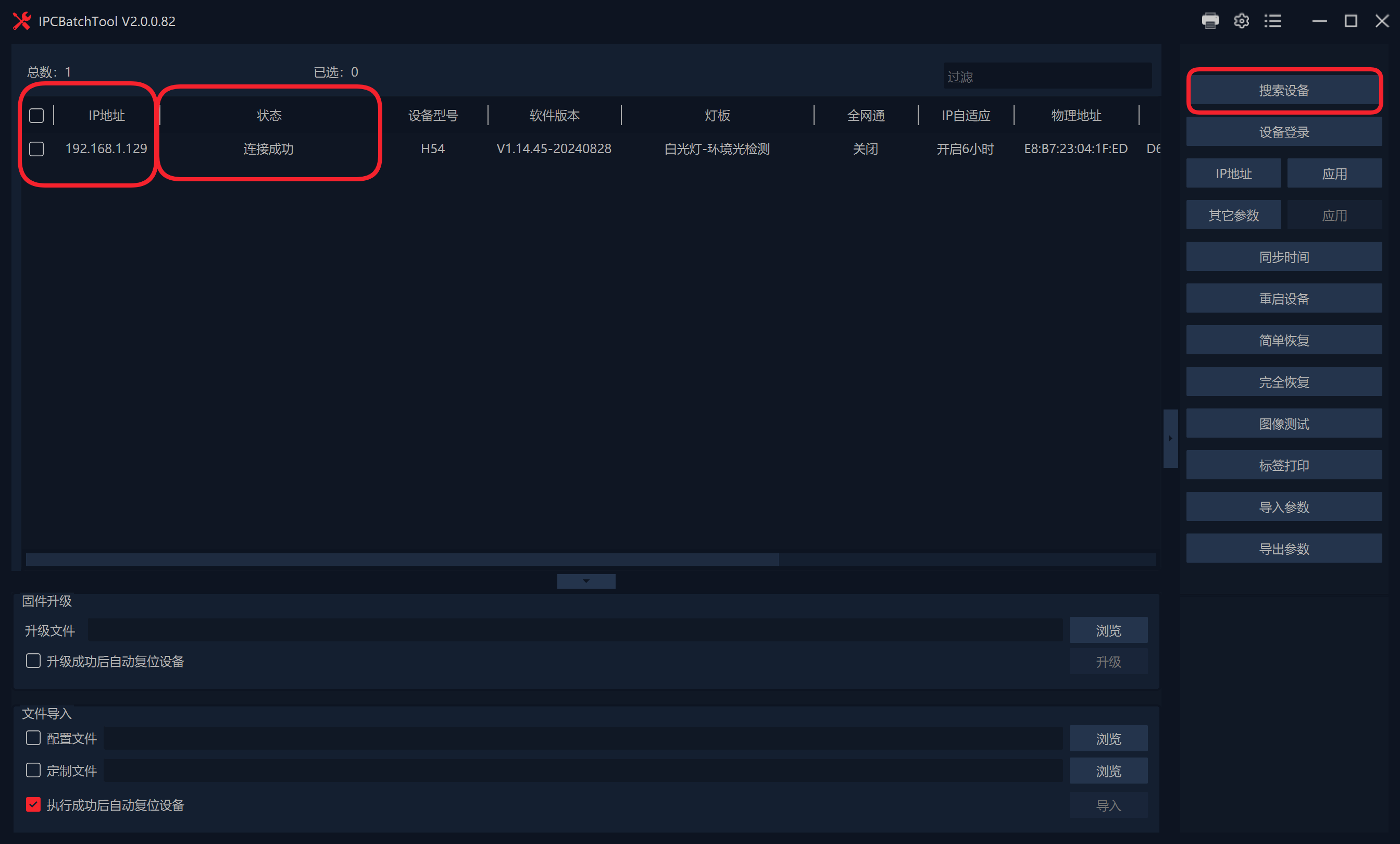
打开软件IPCBatchTool
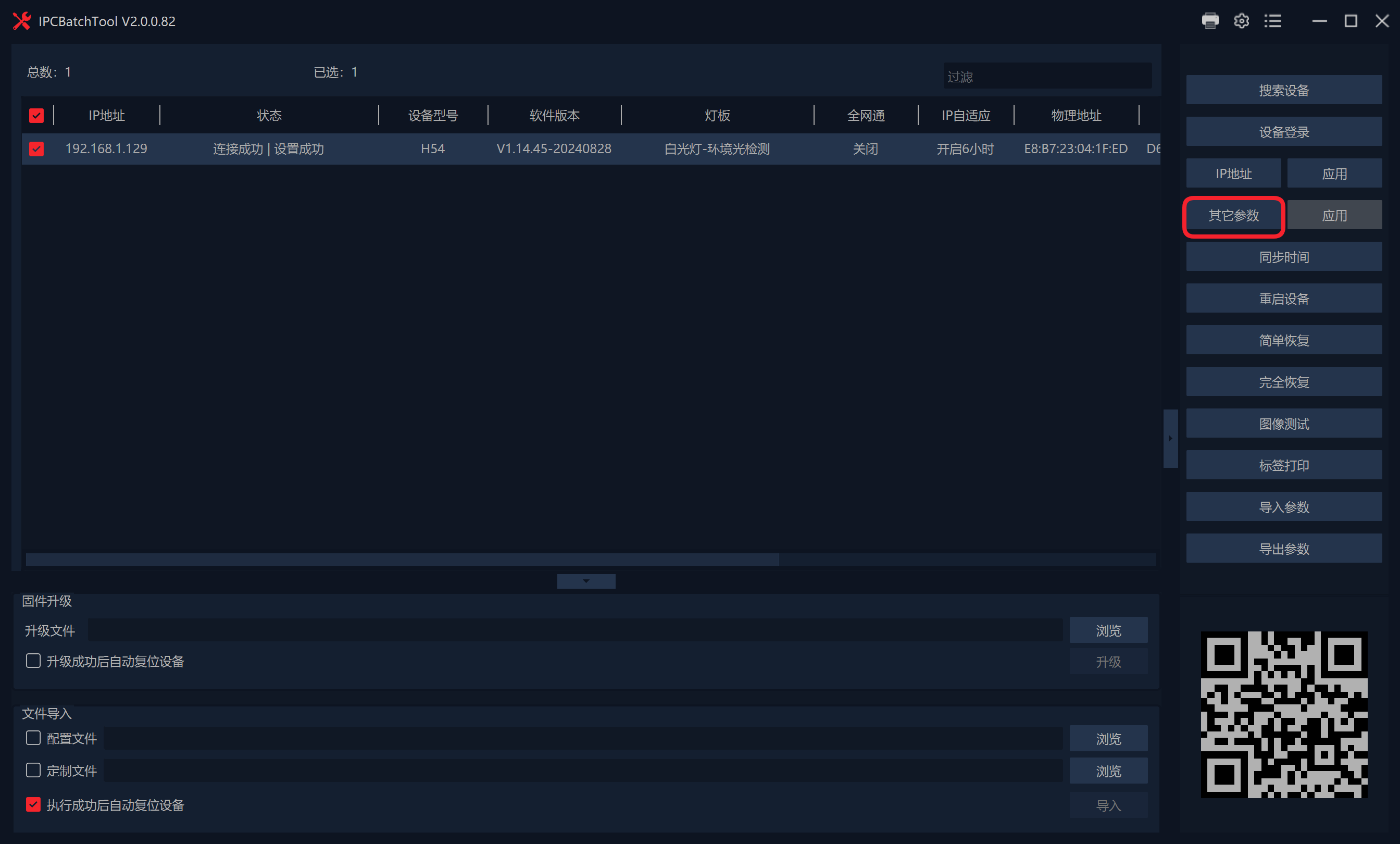
点击搜索设备,出现下面"IP地址"和"连接成功"
双击之后会发现摄像头反转了,我们需要调整画面设置。

勾选我们的设备"其他参数"
勾选图像并打开翻转和镜像开关,点击确认
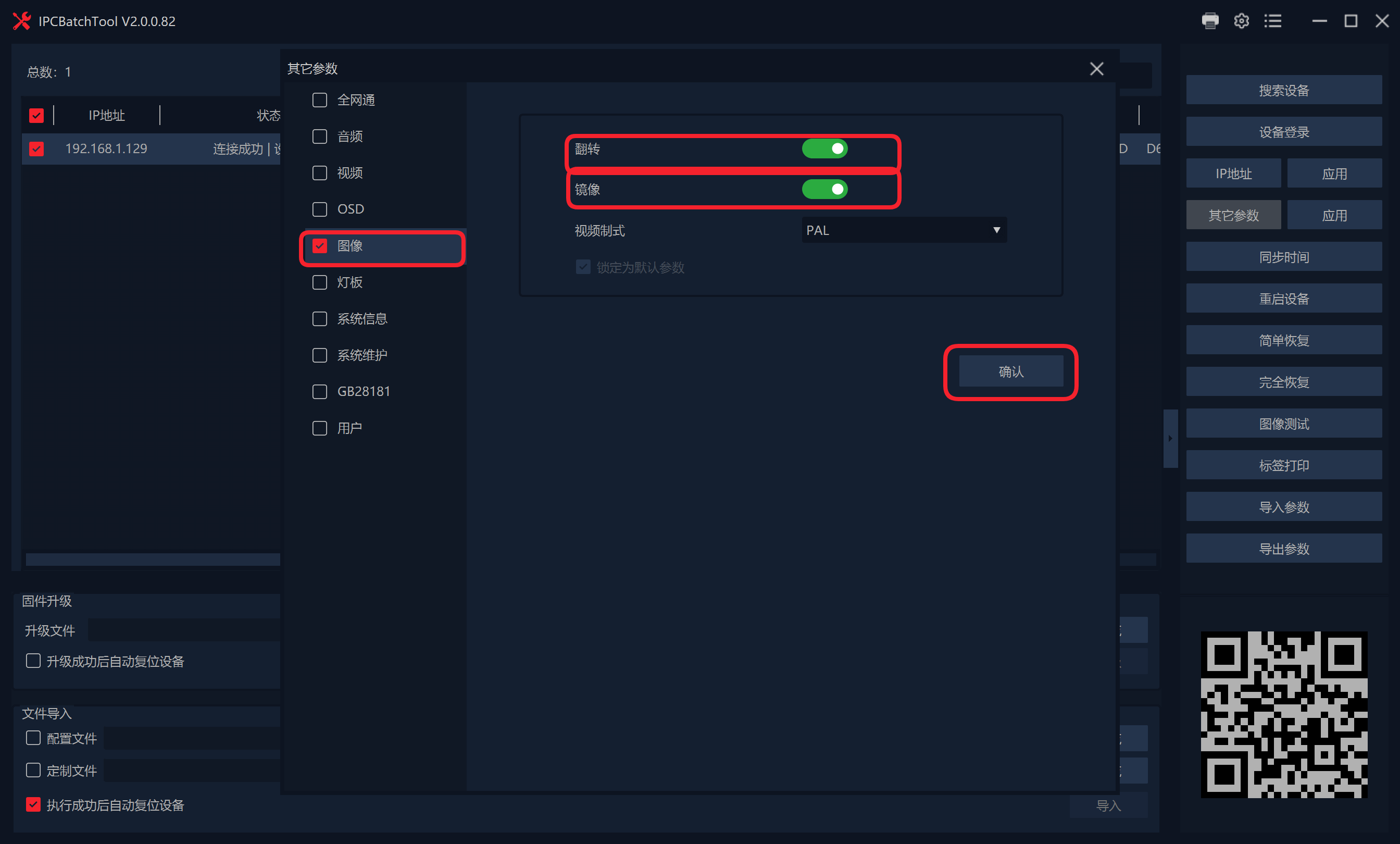
确认之后还需要点击应用
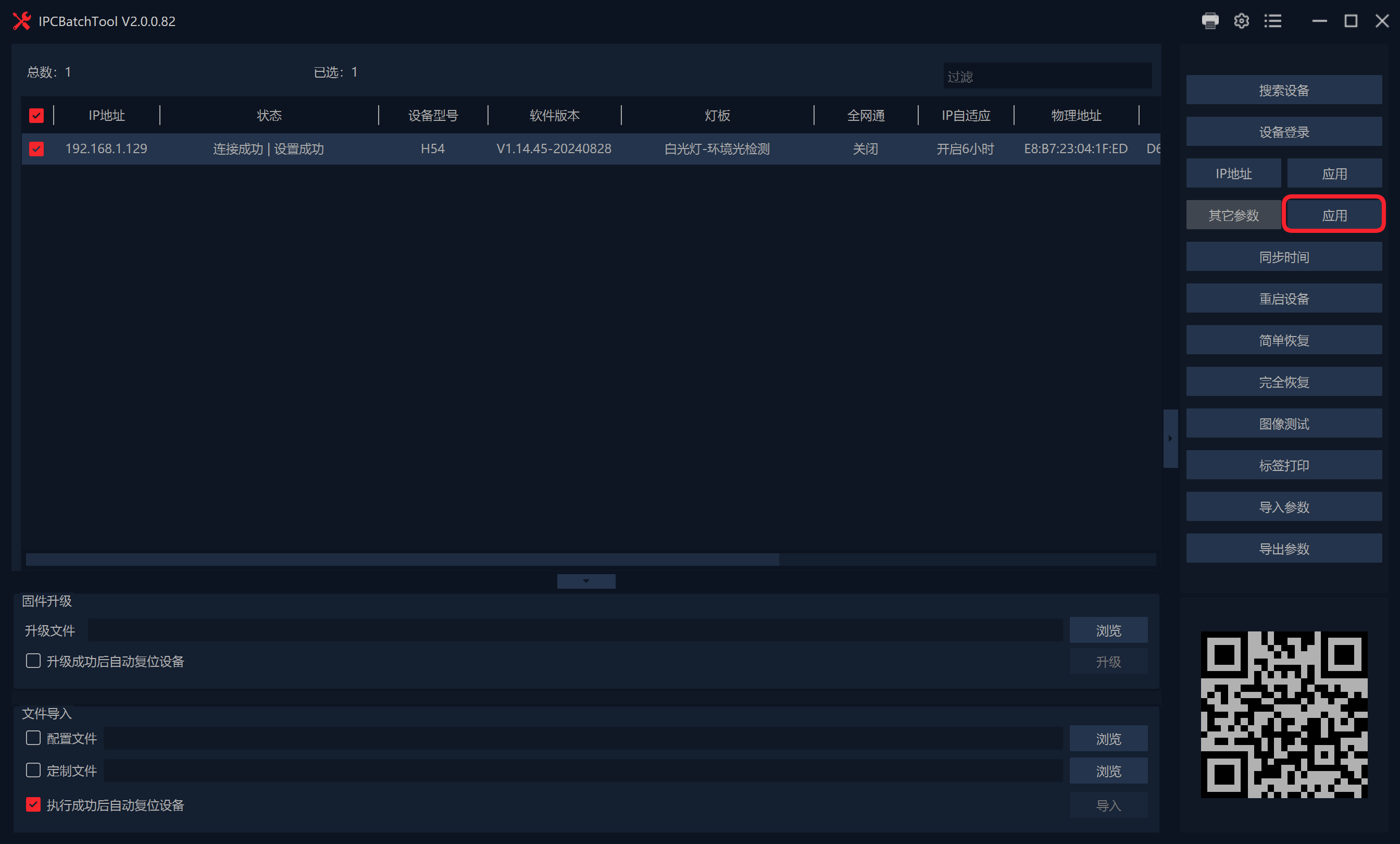
这样我们的摄像头就配置好了
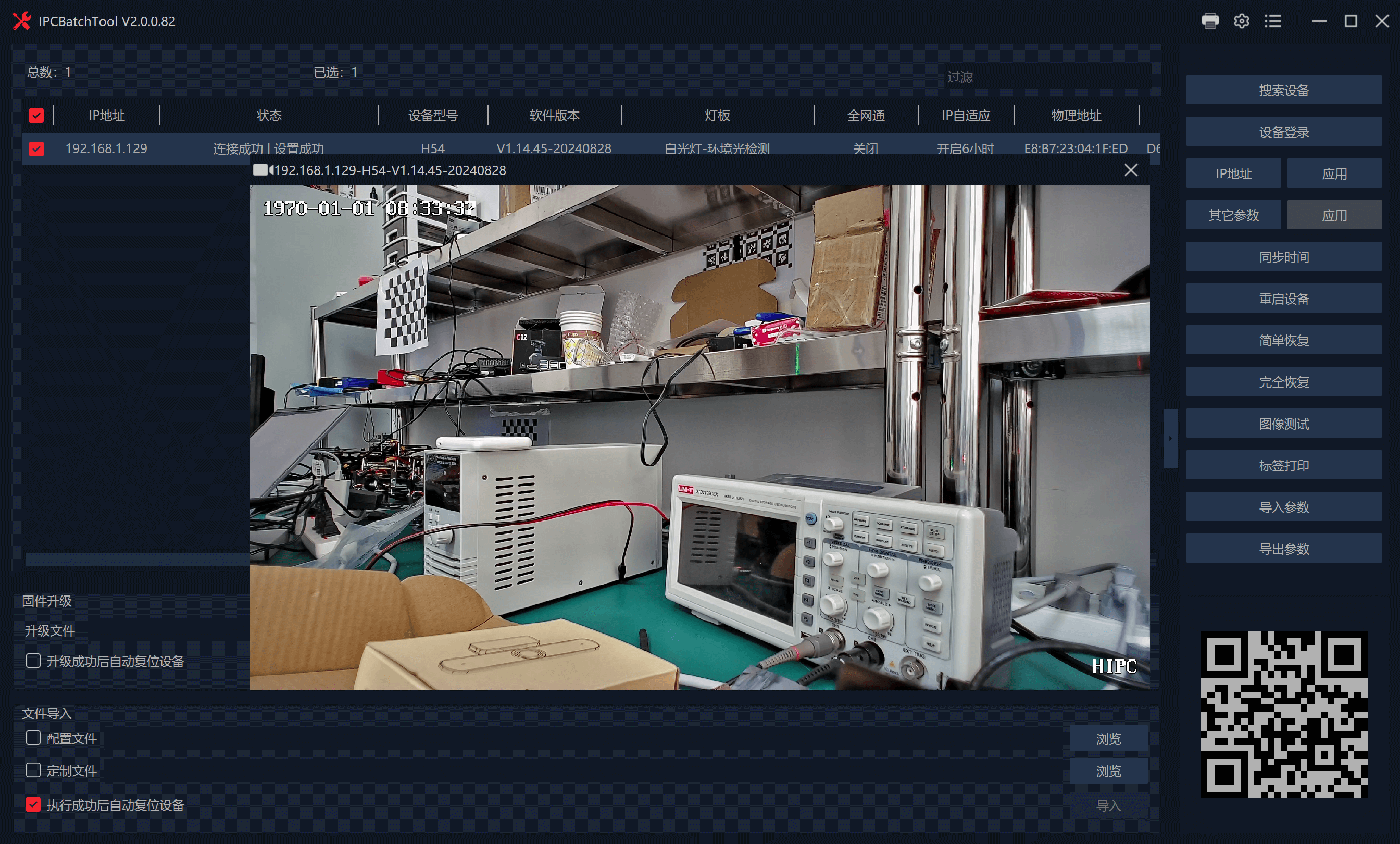
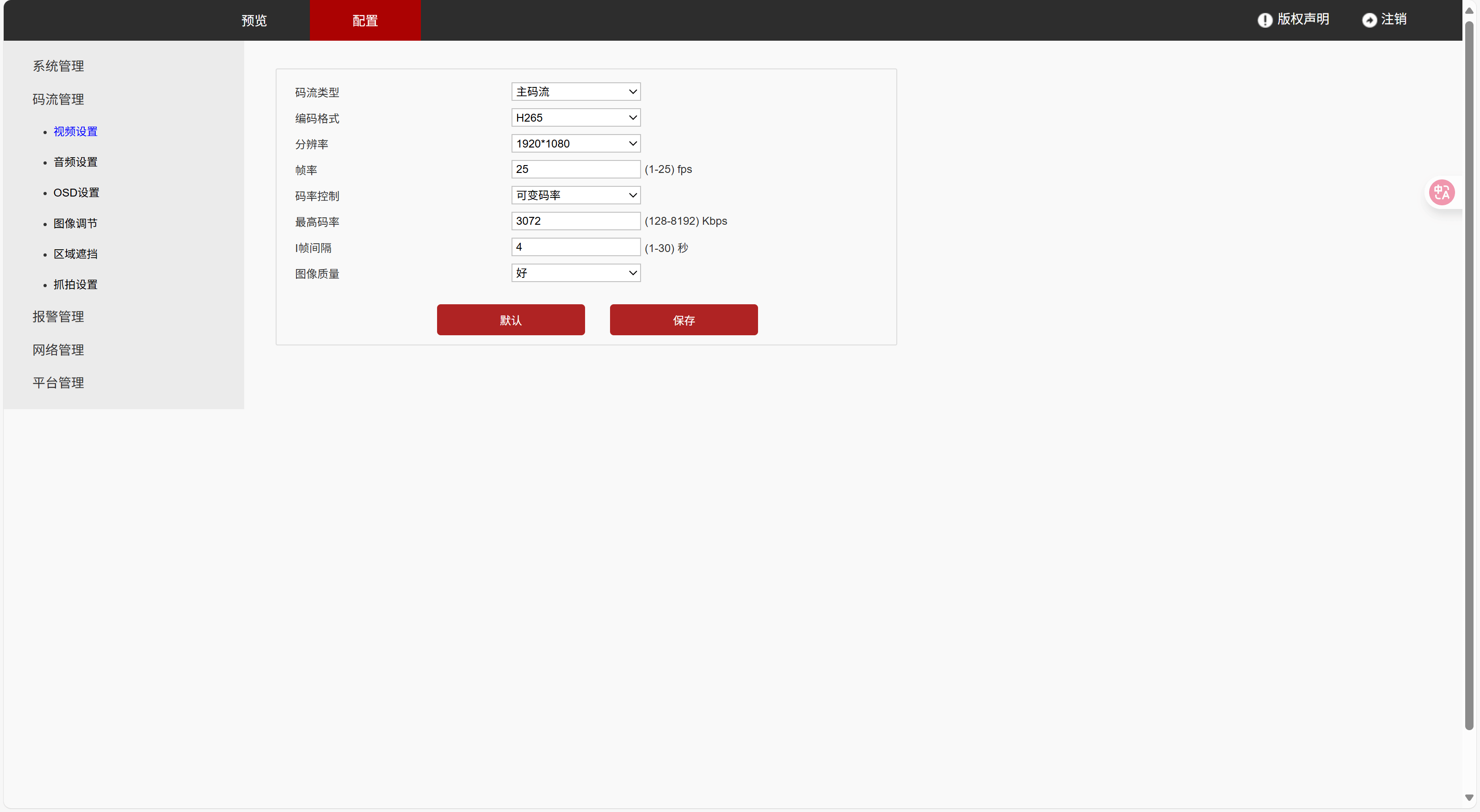
根据自己的网络环境配置视频流的分辨率
wifi模块默认使用2880x1616分辨率,对于普通网络压力较大,所以我们需要根据自己的网络环境配置视频分辨率
在网页上打开http://192.168.1.129(ip地址可以通过软件查看)
输入账号密码
admin
123456
在下面配置并保存
使用代码显示图片
先使用ffmpeg工具测试
ffplay -rtsp_transport tcp -fflags nobuffer -flags low_delay -framedrop -probesize 32 -analyzeduration 0 -i rtsp://192.168.1.129:554/stream1
配置电脑环境
TcpNoDelay_recvstream_PC.py
├── numpy v1.24.0
└── opencv-contrib-python v4.6.0.66
└── numpy v1.24.0
pip install opencv-contrib-python==4.6.0.66
pip install numpy==1.24.0
将代码空间移动到python环境下
import cv2
import numpy as np
import subprocess
from multiprocessing import Array
def video_display(ffmpeg_command, frame_array, W_img, H_img):
process = subprocess.Popen(ffmpeg_command, stdout=subprocess.PIPE)
while True:
raw_frame = process.stdout.read(W_img * H_img * 3) # RGB 3 channels
if not raw_frame:
break
# 将帧复制到共享内存中
frame = np.frombuffer(raw_frame, dtype=np.uint8).reshape(H_img, W_img, 3)
np.copyto(np.frombuffer(frame_array.get_obj(), dtype=np.uint8).reshape(H_img, W_img, 3), frame)
# 显示帧
cv2.imshow('Real-Time Video', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
process.terminate()
if __name__ == '__main__':
W_img = 1280
H_img = 720
# 创建共享内存(用于进程间通信)
shared_frame = Array('B', W_img * H_img * 3) # RGB 3通道,大小为像素数 × 3
# 使用 ffmpeg 读取流并输出为 RGB 格式
ffmpeg_command = [
'ffplay', '-rtsp_transport', 'tcp', '-fflags', 'nobuffer', '-flags', 'low_delay', '-framedrop', '-probesize', '32', '-analyzeduration', '0', '-i', 'rtsp://192.168.1.129:554/stream1'
]
video_display(ffmpeg_command, shared_frame, W_img, H_img)
运行python文件
python TcpNoDelay_recvstream_PC.py
支持串口透传(用于二次开发)
实验平台:windows11的VMware里Ubuntu-20.04LTS
通过图传模块,我们可以将串口数据透传到飞控
- 创建工作空间
mkdir -p ~/ros_ws/src
cd ~/ros_ws/src
git clone https://github.com/fancinnov/fcu_core_v2.git
git clone https://github.com/fancinnov/quadrotor_msgs.git
cd ..
- 修改launch文件,1公里数图传模块上的串口固定波特率是115200
打开fcu_core_v2下面的launch文件夹的fcu_core.launch文件,做如下更改。

编译并运行
catkin_make
source ./devel/setup.bash
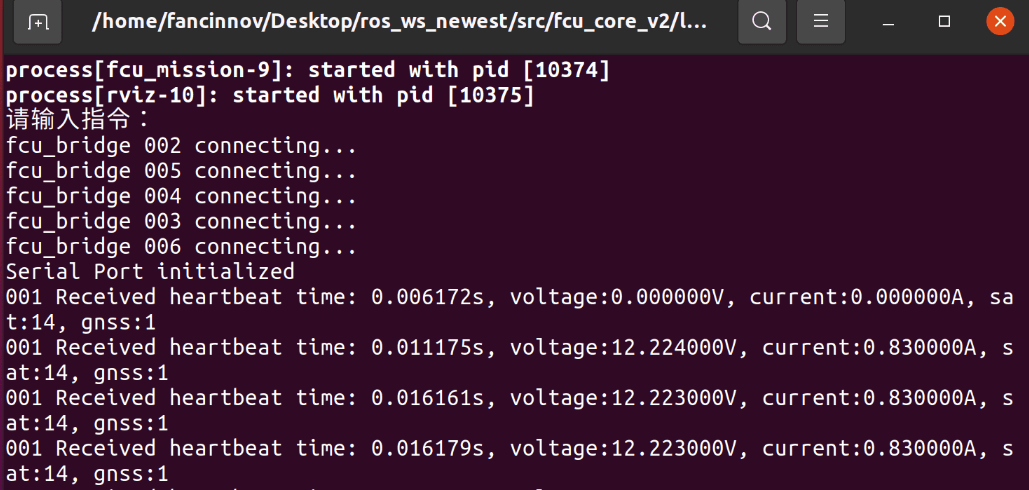
roslaunch fcu_core fcu_core.launch
受到心跳包即为连接成功